Уравнения равновесия и итерационная схема решения
После получения значений контактных сил и неисключенных связей в виде (3.14) для нахождения параметров смещения необходимо составить уравнения равновесия. Следует отметить, что уравнения составляются для каждого из тел (если у него есть ненулевые степени свободы) в направлении каждой ненулевой компоненты перемещения. Для примера рассмотрим равновесие свободного тела (рис. 9), на которое действуют N контактных сил, K неисключенных реакций и главные вектора сил и моментов приведенные к началу координат. Для такого тела можно составить 3 уравнения равновесия, выражающие равенство нулю проекций всех сил на координатные оси и равенство нулю суммарного момента от всех силовых факторов. Это можно записать в виде:
 (3.15)
(3.15)
Не вдаваясь глубоко в математические выкладки, отметим лишь сам принцип нахождения параметров перемещения. Заменяя значения контактных сил и реакций связи в уравнениях равновесия типа (3.15) на параметризованные значения (3.12), вычисленные по результатам решения системы метода сил, можно получить систему линейных алгебраических уравнений, размерность которой будет в точности совпадать с количеством ненулевых степеней свободы в системе.
Решив эту систему и определив все параметры перемещений тел, можно определить по выражениям (3.15) численные значения всех неизвестных силовых факторов, входивших в каноническую систему. Этот шаг завершает цикл действий, связанных с текущим набором пар контакта, и служит отправной точкой к подготовительным действиям для последующей итерации. До сих пор мы никак не обговаривали то, каким образом выбирать размеры пятна контакта. Поэтому все последующие действия связаны с уточнением его размеров и формы.
Итак, зная значения всех силовых факторов, действующих на тела контакта по формулам можно построить деформированное состояние поверхностей контакта для активного и пассивного тел. Выбор пар контакта для последующей итерации основывается на следующих несложных принципах:
1) контактные силы не могут быть притягивающими, поэтому если среди набора контактных сил встречаются силы с отрицательным числовым значением, то соответствующие им пары контакта автоматически исключаются из набора точек;
2) если по результатам построения деформированного состояния в точках поверхности контакта, которые отсутствовали в текущем наборе, мы получаем положительные значение зазора  , то эти точки включаются в набор точек для последующей итерации;
, то эти точки включаются в набор точек для последующей итерации;
3) для точек текущей итерации, в которых мы получили положительное числовое значение контактной силы, мы не выполняем никаких проверок по зазору (значение этой величины для таких точек будет колебаться в пределах случайной погрешности, близкой к нулю) и автоматически переносим их на следующую итерацию.
Стартовый набор точек, необходимый для начала работы алгоритма можно получать, задавая начальные параметры перемещений для тел контакта. При этом желательно делать это таким образом, чтобы получить геометрическое перекрытие для контактирующих поверхностей, близкое к реальному.
Подводя итог решению задач контакта по методу сил, приведем общую схему решения задачи контакта, соответствующую блок-схеме, изображенной на рис. 3.4:
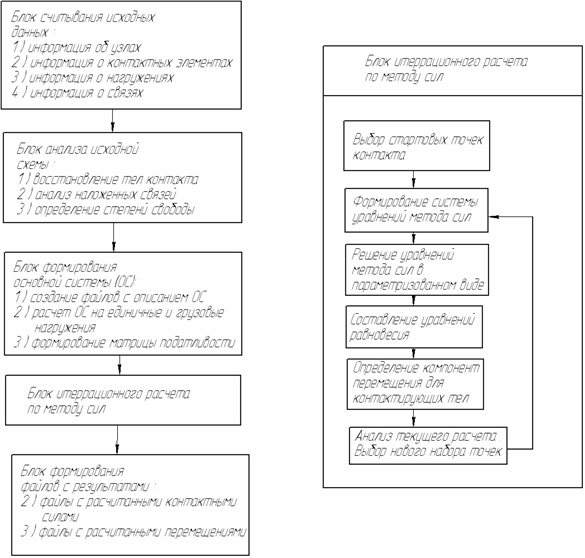
Рис. 3.4. Блок-схема алгоритма метода сил
1) считывание исходных данных;
2) определение тел контакта, путем восстановления связей между узлами;
3) определение контактных элементов;
4) определение степеней свободы каждого из тел и реакций связей, которые нельзя исключить из расчета;
5) введение дополнительных связей, чтобы сделать систему кинематически неизменяемой;
6) формирование файлов с описанием основной системы и обработка их программами обработки исходных данных и статического расчета;
7) формирование матрицы податливости по результатам статических расчетов;
8) расчет нагружения;
8.1) выбор стартовых точек;
8.2) формирование системы уравнений метода сил для выбранных точек;
8.3) решение полученной системы уравнений, нахождение контактных сил и реакций связей в виде параметрических выражений;
8.4) составление уравнений равновесия и нахождение параметров перемещения;
8.5) корректировка выбора точек в зависимости от величины зазора и значений контактных сил;
8.6) если скорректированный набор пар контакта не совпадает с исходным набором, то переходим на пункт (8.2);
8.7) запись результатов от нагружения в файлы;
8.9) если это не последнее нагружение, то переходим на (8.1);
9) формируем конечный файл с результатами и выходим.